Pick and Place project
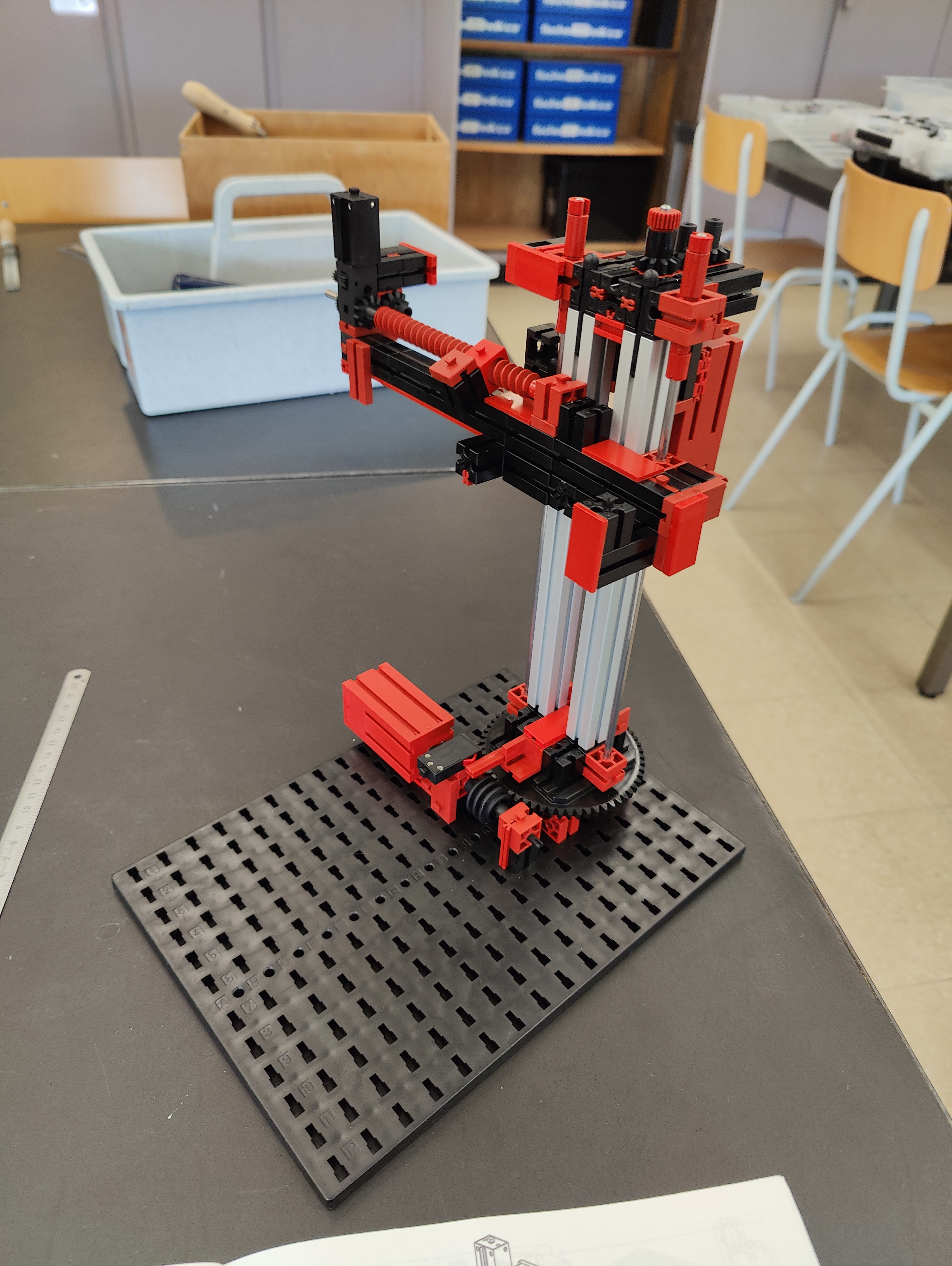
Het project is gericht op het bouwen van een pick and place robot met behulp van een fischertechnik kit en het aansturen van de motoren met een Arduino. De robot zal in staat zijn om objecten op te pakken en te verplaatsen naar een andere locatie. Om de positie van de motoren nauwkeurig te bepalen, zullen eindschakelaars worden gebruikt.
Doelstellingen van het project:
Het bouwen van een functionele pick and place robot met behulp van de fischertechnik kit. Het aansturen van de DC-motoren van de robot met een Arduino. Het gebruikmaken van de encoders om de positie van de motoren te meten. Het programmeren van de Arduino om de robot nauwkeurig te besturen en objecten op te pakken en te verplaatsen. Het implementeren van eindschakelaars om de 0 positie van de motoren te bepalen.
Beschrijving van het probleem dat wordt aangepakt:
Het probleem dat wordt aangepakt is het aansturen van de motoren van de pick and place robot zonder gebruik te maken van de dure module die normaal gesproken wordt gebruikt. Door de Arduino te gebruiken als een betaalbaar alternatief, kun je de motoren op een efficiënte manier aansturen en de functionaliteit van de robot realiseren. Je kan daardoor dus ook extra functionaliteiten toevoegen. Daarnaast is het belangrijk om de 0 positie van de motoren nauwkeurig te bepalen, en hiervoor worden eindschakelaars gebruikt. Met behulp van de eindschakelaars kan de robot altijd naar de juiste beginpositie terugkeren wanneer de Arduino opstart, of na een beweging.